The Apollo Guidance Computer (AGC) was a digital computer produced for the Apollo program that was installed on board each Apollo command module (CM) and Apollo Lunar Module (LM). The AGC provided computation and electronic interfaces for guidance, navigation, and control of the spacecraft. The AGC was the first computer based on silicon integrated circuits. The computer's performance was comparable to the first generation of home computers from the late 1970s, such as the Apple II, TRS-80, and Commodore PET.
Apollo Guidance Computer and DSKY
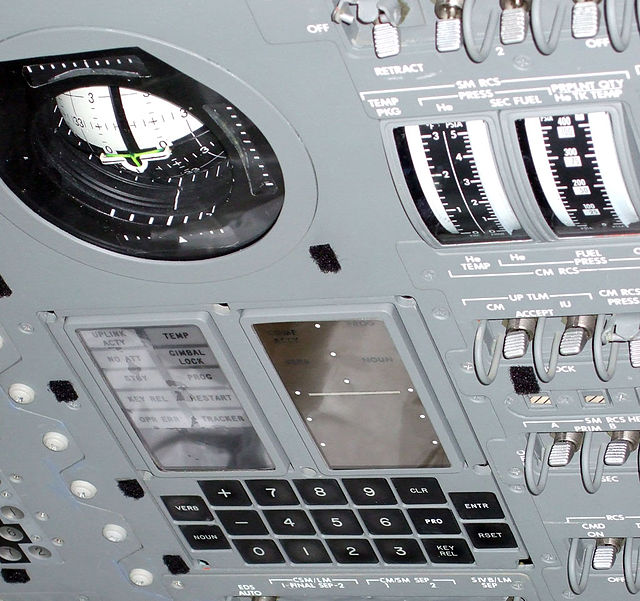
The display and keyboard (DSKY) interface of the Apollo Guidance Computer mounted on the control panel of the command module, with the flight director attitude indicator (FDAI) above
Partial list of numeric codes for verbs and nouns in the Apollo Guidance Computer, printed for quick reference on a side panel
Photograph of the dual NOR gate chip used to build the Block II Apollo Guidance Computer. Connections (clockwise from top center) ground, inputs (3), output, power, output, inputs (3).
Apollo command and service module
The Apollo command and service module (CSM) was one of two principal components of the United States Apollo spacecraft, used for the Apollo program, which landed astronauts on the Moon between 1969 and 1972. The CSM functioned as a mother ship, which carried a crew of three astronauts and the second Apollo spacecraft, the Apollo Lunar Module, to lunar orbit, and brought the astronauts back to Earth. It consisted of two parts: the conical command module, a cabin that housed the crew and carried equipment needed for atmospheric reentry and splashdown; and the cylindrical service module which provided propulsion, electrical power and storage for various consumables required during a mission. An umbilical connection transferred power and consumables between the two modules. Just before reentry of the command module on the return home, the umbilical connection was severed and the service module was cast off and allowed to burn up in the atmosphere.

Apollo CSM Endeavour in lunar orbit during Apollo 15
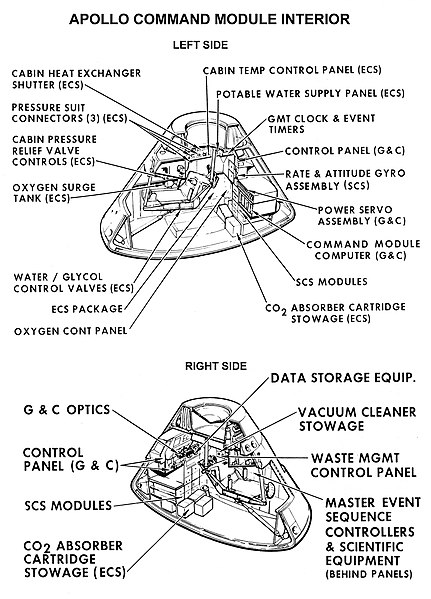
Command module interior arrangement
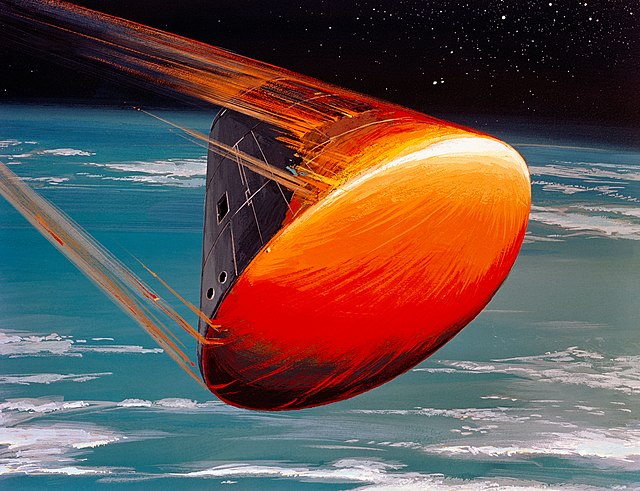
Command module reentering the atmosphere at a non-zero angle of attack in order to establish a lifting entry and control the landing site (artistic rendition)
Scale model of the Apollo command and service module at the Euro Space Center in Belgium