Central processing unit
Videos
A central processing unit (CPU), also called a central processor, main processor, or just processor, is the most important processor in a given computer. Its electronic circuitry executes instructions of a computer program, such as arithmetic, logic, controlling, and input/output (I/O) operations. This role contrasts with that of external components, such as main memory and I/O circuitry, and specialized coprocessors such as graphics processing units (GPUs).

Inside a central processing unit: The integrated circuit of Intel's Xeon 3060, first manufactured in 2006
EDVAC, one of the first stored-program computers
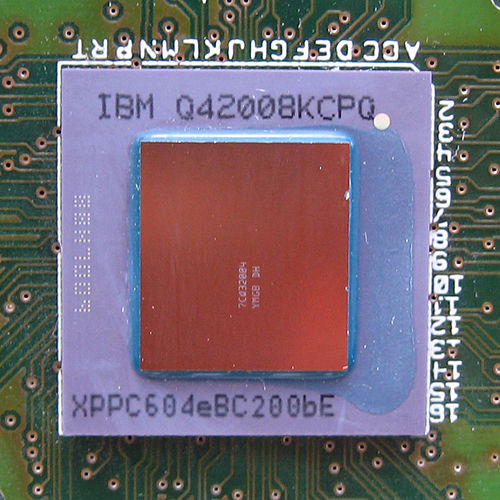
IBM PowerPC 604e processor

Fujitsu board with SPARC64 VIIIfx processors
Arithmetic
Videos
Arithmetic is an elementary branch of mathematics that studies numerical operations like addition, subtraction, multiplication, and division. In a wider sense, it also includes exponentiation, extraction of roots, and taking logarithms.

Calculations in mental arithmetic are done exclusively in the mind without relying on external aids.

Abacuses are tools to perform arithmetic operations by moving beads.

Some historians interpret the Ishango bone as one of the earliest arithmetic artifacts.

Image: Vlčí radius