Classical mechanics
Videos
Classical mechanics is a physical theory describing the motion of objects such as projectiles, parts of machinery, spacecraft, planets, stars, and galaxies. The development of classical mechanics involved substantial change in the methods and philosophy of physics. The qualifier classical distinguishes this type of mechanics from physics developed after the revolutions in physics of the early 20th century, all of which revealed limitations in classical mechanics.


Lagrange's contribution was realising Newton's ideas in the language of modern mathematics, now called Lagrangian mechanics.

Hamilton developed an alternative to Lagrangian mechanics now called Hamiltonian mechanics.
Machine
Videos
A machine is a physical system that uses power to apply forces and control movement to perform an action. The term is commonly applied to artificial devices, such as those employing engines or motors, but also to natural biological macromolecules, such as molecular machines. Machines can be driven by animals and people, by natural forces such as wind and water, and by chemical, thermal, or electrical power, and include a system of mechanisms that shape the actuator input to achieve a specific application of output forces and movement. They can also include computers and sensors that monitor performance and plan movement, often called mechanical systems.

A Honda F1 racecar engine

A flint hand axe was found in Winchester.
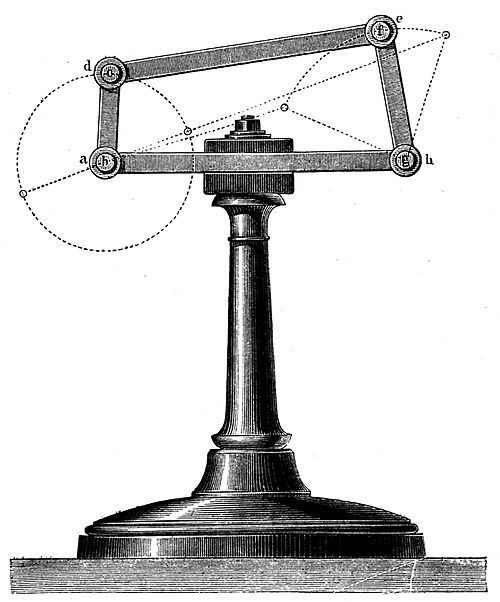
The Kinematics of Machinery (1876) has an illustration of a four-bar linkage.

Diesel engine, friction clutch and gear transmission of an automobile