There are several categories of decompression equipment used to help divers decompress, which is the process required to allow divers to return to the surface safely after spending time underwater at higher ambient pressures.
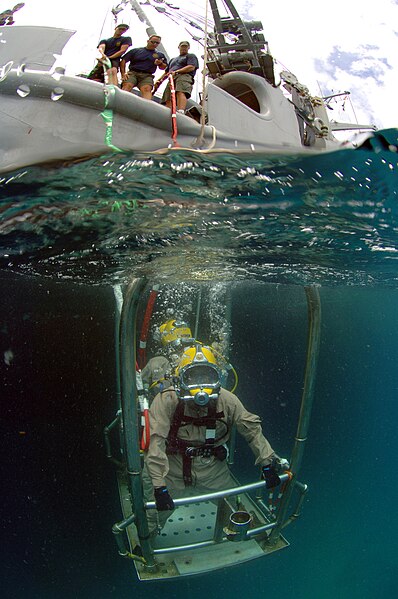
Surface supplied diver on diving stage
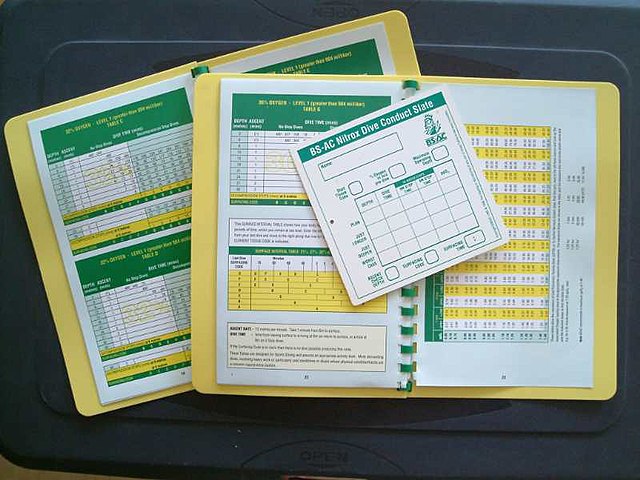
BSAC nitrox decompression tables
The PADI Nitrox tables are laid out in what has become a common format for no-stop recreational tables
The PADI recreational dive planner, in "Wheel" format.
To prevent or minimize decompression sickness, divers must properly plan and monitor decompression. Divers follow a decompression model to safely allow the release of excess inert gases dissolved in their body tissues, which accommodated as a result of breathing at ambient pressures greater than surface atmospheric pressure. Decompression models take into account variables such as depth and time of dive, breathing gasses, altitude, and equipment to develop appropriate procedures for safe ascent.
Divers using the anchor cable as an aid to depth control during a decompression stop during ascent.
Technical diver at a decompression stop.
Divers breathing oxygen during surface decompression in the chamber after a 240 feet (73 m) dive
Part of a saturation system