Diesel locomotive
Videos
A diesel locomotive is a type of railway locomotive in which the power source is a diesel engine. Several types of diesel locomotives have been developed, differing mainly in the means by which mechanical power is conveyed to the driving wheels. The most common are diesel-electric locomotives and diesel-hydraulic.

The ČKD ČME3, a common example of a diesel shunting locomotive

The InterCity 125 set a speed record – 148 mph (238 km/h) – for a diesel-powered train in 1987. Capable of 125 mph (201 km/h) in regular service, the train consists of two power cars with either seven or eight carriages between them.

These locomotives operated by Pacific National in Australia show three styles of diesel locomotive body: cab unit (front), hood unit, and flat-nose (rear).

Petrol–electric Weitzer railmotor, first 1903, series 1906
Rail transport
Videos
Rail transport is a means of transport using wheeled vehicles running in tracks, which usually consist of two parallel steel rails. Rail transport is one of the two primary means of land transport, next to road transport. It is used for about 8% of passenger and freight transport globally, thanks to its energy efficiency and potentially high speed.

A train in Alaska transporting crude oil in March 2006

A 16th-century minecart, an early example of unpowered rail transport

A replica of a "Little Eaton Tramway" wagon; the tracks are plateways.
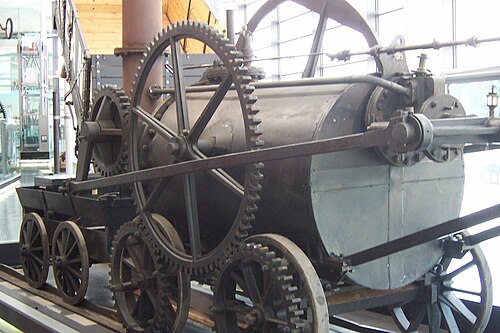
A replica of Trevithick's engine at the National Waterfront Museum in Swansea, Wales