Disdyakis dodecahedron
Videos
Photos
In geometry, a disdyakis dodecahedron,, is a Catalan solid with 48 faces and the dual to the Archimedean truncated cuboctahedron. As such it is face-transitive but with irregular face polygons. It resembles an augmented rhombic dodecahedron. Replacing each face of the rhombic dodecahedron with a flat pyramid creates a polyhedron that looks almost like the disdyakis dodecahedron, and is topologically equivalent to it.
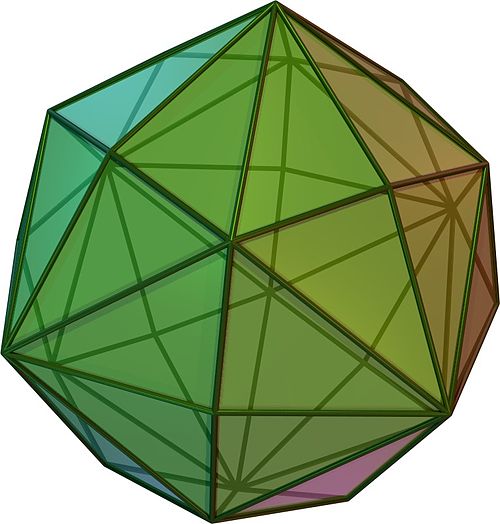
Image: Disdyakisdodecahedron
Catalan solid
Videos
Photos
In mathematics, a Catalan solid, or Archimedean dual, is a polyhedron that is dual to an Archimedean solid. There are 13 Catalan solids. They are named after the Belgian mathematician Eugène Catalan, who first described them in 1865.

Image: Triakistetrahedron

Image: Triakisoctahedron
Image: Disdyakisdodecahedron
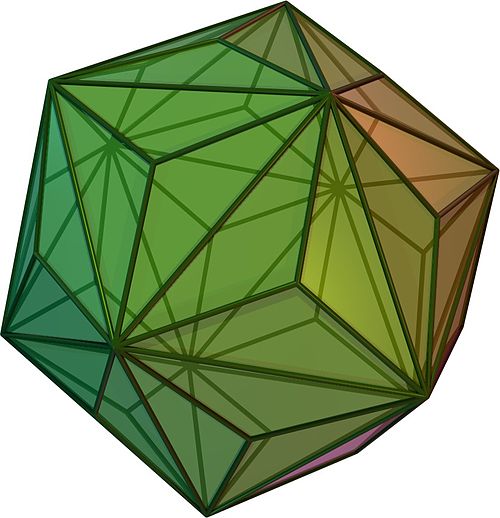
Image: Triakisicosahedron