Dynamic random-access memory
Videos
Dynamic random-access memory is a type of random-access semiconductor memory that stores each bit of data in a memory cell, usually consisting of a tiny capacitor and a transistor, both typically based on metal–oxide–semiconductor (MOS) technology. While most DRAM memory cell designs use a capacitor and transistor, some only use two transistors. In the designs where a capacitor is used, the capacitor can either be charged or discharged; these two states are taken to represent the two values of a bit, conventionally called 0 and 1. The electric charge on the capacitors gradually leaks away; without intervention the data on the capacitor would soon be lost. To prevent this, DRAM requires an external memory refresh circuit which periodically rewrites the data in the capacitors, restoring them to their original charge. This refresh process is the defining characteristic of dynamic random-access memory, in contrast to static random-access memory (SRAM) which does not require data to be refreshed. Unlike flash memory, DRAM is volatile memory, since it loses its data quickly when power is removed. However, DRAM does exhibit limited data remanence.
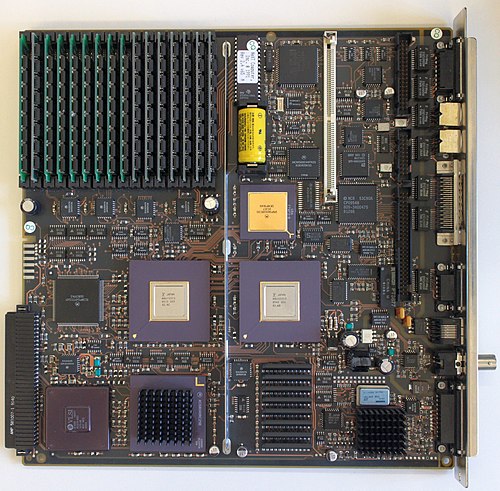
Motherboard of the NeXTcube computer, 1990, with 64 MiB main memory DRAM (top left) and 256 KiB of VRAM (lower edge, right of middle)

A pair of 32 MB EDO DRAM modules

A 512-MBit Qimonda GDDR3 SDRAM package

Inside a Samsung GDDR3 256-MBit package
Data remanence
Videos
Data remanence is the residual representation of digital data that remains even after attempts have been made to remove or erase the data. This residue may result from data being left intact by a nominal file deletion operation, by reformatting of storage media that does not remove data previously written to the media, or through physical properties of the storage media that allow previously written data to be recovered. Data remanence may make inadvertent disclosure of sensitive information possible should the storage media be released into an uncontrolled environment.

The pieces of a physically destroyed hard disk drive.

Hard drive mechanically broken by a data destroying device (after degaussing)