Force
Videos
Photos
In physics, a force is an influence that can cause an object to change its velocity, i.e., to accelerate, meaning a change in speed or direction, unless counterbalanced by other forces. The concept of force makes the everyday notion of pushing or pulling mathematically precise. Because the magnitude and direction of a force are both important, force is a vector quantity. The SI unit of force is the newton (N), and force is often represented by the symbol F.
Aristotle famously described a force as anything that causes an object to undergo "unnatural motion"

Sir Isaac Newton in 1689. His Principia presented his three laws of motion in geometrical language, whereas modern physics uses differential calculus and vectors.

Galileo Galilei was the first to point out the inherent contradictions contained in Aristotle's description of forces.
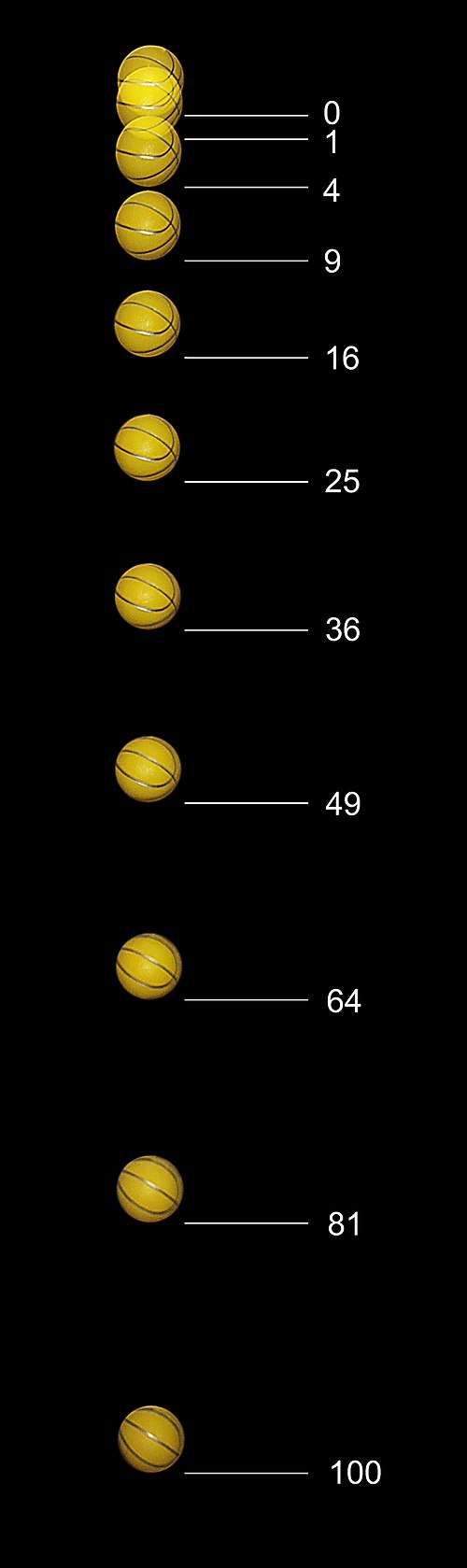
Images of a freely falling basketball taken with a stroboscope at 20 flashes per second. The distance units on the right are multiples of about 12 millimeters. The basketball starts at rest. At the time of the first flash (distance zero) it is released, after which the number of units fallen is equal to the square of the number of flashes.
Physics
Videos
Photos
Physics is the natural science of matter, involving the study of matter, its fundamental constituents, its motion and behavior through space and time, and the related entities of energy and force. Physics is one of the most fundamental scientific disciplines, with its main goal being to understand how the universe behaves. A scientist who specializes in the field of physics is called a physicist.

Ancient Egyptian astronomy is evident in monuments like the ceiling of Senemut's tomb from the Eighteenth Dynasty of Egypt.

Galileo Galilei (1564–1642) related mathematics, theoretical physics, and experimental physics.
Isaac Newton discovered the laws of motion and universal gravitation

Max Planck (1858–1947), the originator of the theory of quantum mechanics