Frequency
Videos
Photos
Frequency, most often measured in hertz, is the number of occurrences of a repeating event per unit of time. It is also occasionally referred to as temporal frequency for clarity and to distinguish it from spatial frequency. Ordinary frequency is related to angular frequency by a factor of 2π. The period is the interval of time between events, so the period is the reciprocal of the frequency: f = 1/T.

Modern frequency counter

Image: Resonant reed frequency meter

Image: Czestosciomierz 49.9Hz
Oscillation
Videos
Photos
Oscillation is the repetitive or periodic variation, typically in time, of some measure about a central value or between two or more different states. Familiar examples of oscillation include a swinging pendulum and alternating current. Oscillations can be used in physics to approximate complex interactions, such as those between atoms.
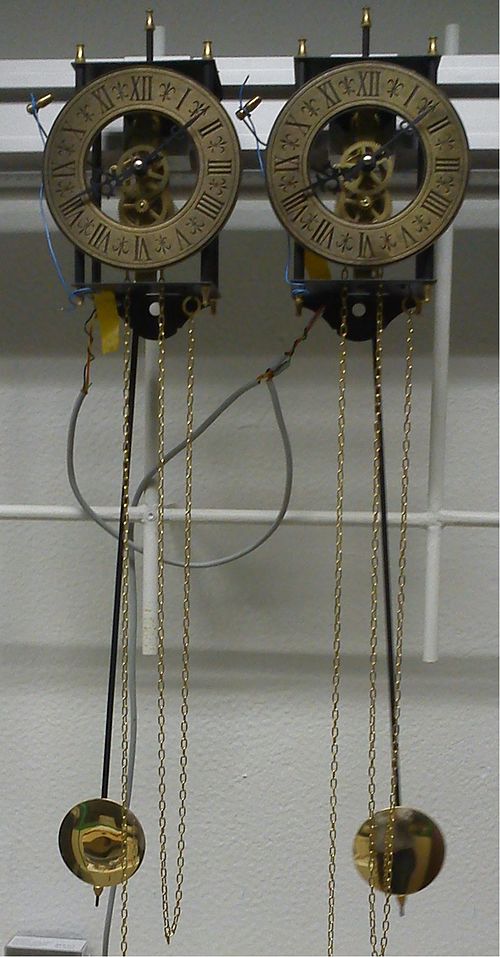
Experimental Setup of Huygens synchronization of two clocks