Kepler–Poinsot polyhedron
Videos
Page
In geometry, a Kepler–Poinsot polyhedron is any of four regular star polyhedra.
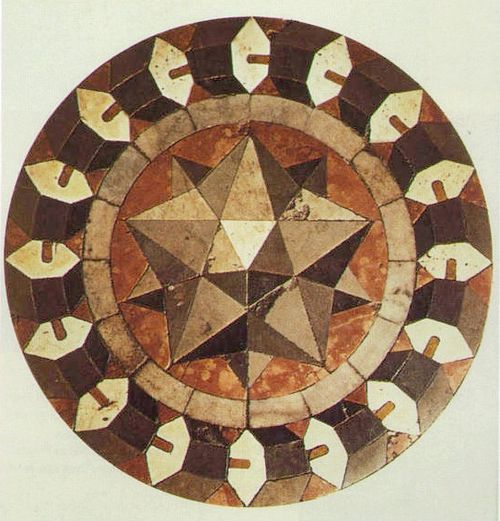
Floor mosaic in St Mark's, Venice (possibly by Paolo Uccello)
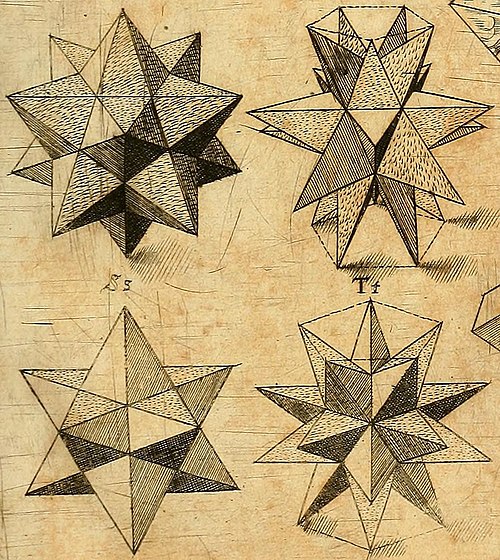
Stellated dodecahedra, Harmonices Mundi by Johannes Kepler (1619)

Cardboard model from Tübingen University (around 1860)

Alexander's Star
Regular polyhedron
Videos
Page
A regular polyhedron is a polyhedron whose symmetry group acts transitively on its flags. A regular polyhedron is highly symmetrical, being all of edge-transitive, vertex-transitive and face-transitive. In classical contexts, many different equivalent definitions are used; a common one is that the faces are congruent regular polygons which are assembled in the same way around each vertex.

The coccolithophore Braarudosphaera bigelowii has a regular dodecahedral structure

The radiolarian Circogonia icosahedra has a regular icosahedral structure

A myovirus typically has a regular icosahedral capsid (head) about 100 nanometers across.

Image: Tetrahedron