Kinematics
Videos
Kinematics is a subfield of physics and mathematics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of both applied and pure mathematics since it can be studied without considering the mass of a body or the forces acting upon it. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.

Each particle on the wheel travels in a planar circular trajectory (Kinematics of Machinery, 1876).
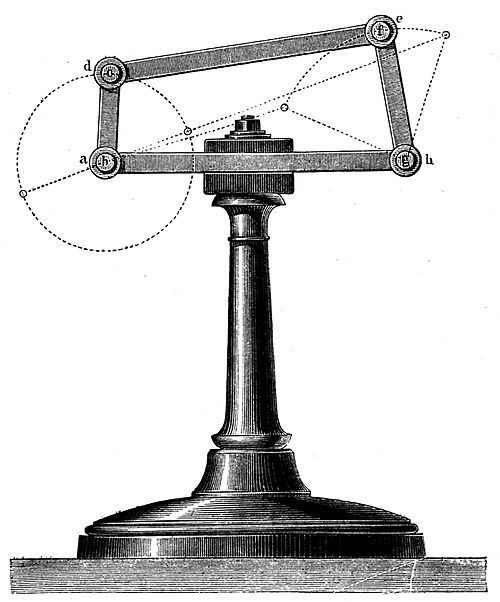
Illustration of a four-bar linkage from Kinematics of Machinery, 1876
Physics
Videos
Physics is the natural science of matter, involving the study of matter, its fundamental constituents, its motion and behavior through space and time, and the related entities of energy and force. Physics is one of the most fundamental scientific disciplines, with its main goal being to understand how the universe behaves. A scientist who specializes in the field of physics is called a physicist.

Ancient Egyptian astronomy is evident in monuments like the ceiling of Senemut's tomb from the Eighteenth Dynasty of Egypt.

Galileo Galilei (1564–1642) related mathematics, theoretical physics, and experimental physics.

Isaac Newton discovered the laws of motion and universal gravitation

Max Planck (1858–1947), the originator of the theory of quantum mechanics