Lidar
Videos
Photos
Lidar is a method for determining ranges by targeting an object or a surface with a laser and measuring the time for the reflected light to return to the receiver. Lidar may operate in a fixed direction or it may scan multiple directions, in which case it is known as lidar scanning or 3D laser scanning, a special combination of 3-D scanning and laser scanning. Lidar has terrestrial, airborne, and mobile applications.

Lidar-derived image of Marching Bears Mound Group, Effigy Mounds National Monument
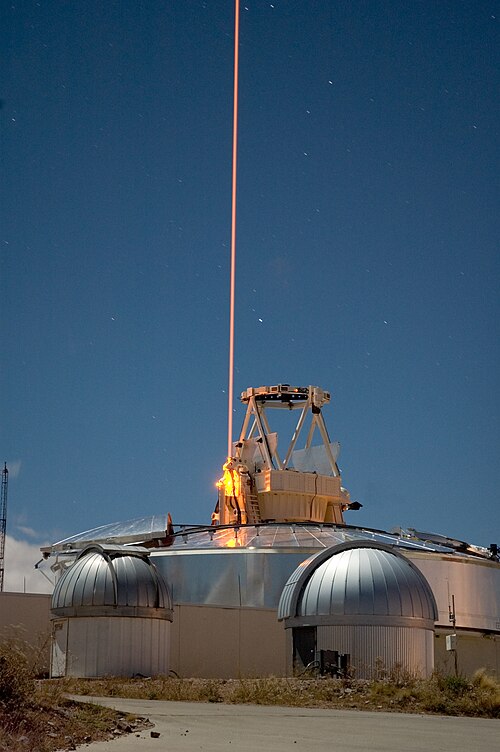
A frequency addition source of optical radiation (FASOR) used at the Starfire Optical Range for lidar and laser guide star experiments is tuned to the sodium D2a line and used to excite sodium atoms in the upper atmosphere.

This lidar may be used to scan buildings, rock formations, et cetera, to produce a 3D model. The lidar can aim its laser beam in a wide range: its head rotates horizontally; a mirror tilts vertically. The laser beam is used to measure the distance to the first object on its path.

Lidar scanning performed with a multicopter UAV
3D scanning
Videos
Photos
3D scanning is the process of analyzing a real-world object or environment to collect three dimensional data of its shape and possibly its appearance. The collected data can then be used to construct digital 3D models.

Making a 3D-model of a Viking belt buckle using a hand held VIUscan 3D laser scanner
This lidar scanner may be used to scan buildings, rock formations, etc., to produce a 3D model. The lidar can aim its laser beam in a wide range: its head rotates horizontally, a mirror flips vertically. The laser beam is used to measure the distance to the first object on its path.

3D reconstruction of the brain and eyeballs from CT scanned DICOM images. In this image, areas with the density of bone or air were made transparent, and the slices stacked up in an approximate free-space alignment. The outer ring of material around the brain are the soft tissues of skin and muscle on the outside of the skull. A black box encloses the slices to provide the black background. Since these are simply 2D images stacked up, when viewed on edge the slices disappear since they have effectively zero thickness. Each DICOM scan represents about 5 mm of material averaged into a thin slice.

3D selfie in 1:20 scale printed by Shapeways using gypsum-based printing, created by Madurodam miniature park from 2D pictures taken at its Fantasitron photo booth