Linkage (mechanical)
Videos
Page
A mechanical linkage is an assembly of systems connected to manage forces and movement. The movement of a body, or link, is studied using geometry so the link is considered to be rigid. The connections between links are modeled as providing ideal movement, pure rotation or sliding for example, and are called joints. A linkage modeled as a network of rigid links and ideal joints is called a kinematic chain.
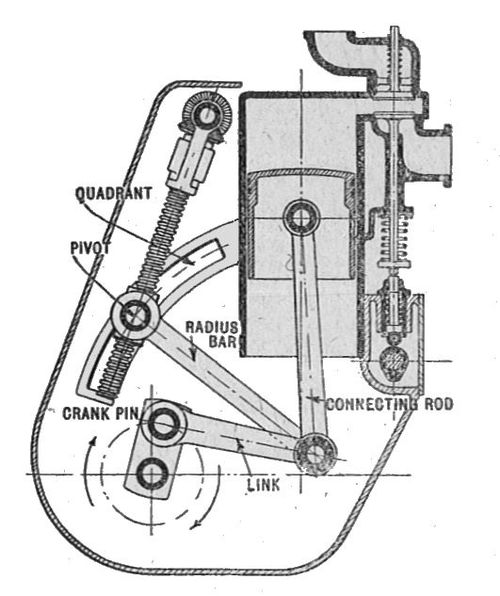
Variable stroke engine (Autocar Handbook, Ninth edition)

An extended scissor lift

Locking pliers exemplify a four-bar, one degree of freedom mechanical linkage. The adjustable base pivot makes this a two degree-of-freedom five-bar linkage.
Kinematic chain
Videos
Page
In mechanical engineering, a kinematic chain is an assembly of rigid bodies connected by joints to provide constrained motion that is the mathematical model for a mechanical system. As the word chain suggests, the rigid bodies, or links, are constrained by their connections to other links. An example is the simple open chain formed by links connected in series, like the usual chain, which is the kinematic model for a typical robot manipulator.

The JPL mobile robot ATHLETE is a platform with six serial chain legs ending in wheels.

The arms, fingers, and head of the JSC Robonaut are modeled as kinematic chains.