Mars Reconnaissance Orbiter
Videos
The Mars Reconnaissance Orbiter (MRO) is a spacecraft designed to search for the existence of water on Mars and provide support for missions to Mars, as part of NASA's Mars Exploration Program. It was launched from Cape Canaveral on August 12, 2005, at 11:43 UTC and reached Mars on March 10, 2006, at 21:24 UTC. In November 2006, after six months of aerobraking, it entered its final science orbit and began its primary science phase.

Mars Reconnaissance Orbiter spacecraft

Launch of Atlas V carrying the MRO, 11:43:00 UTC August 12, 2005

Artwork of MRO aerobraking

Tectonic fractures within the Candor Chasma region of Valles Marineris, Mars, retain ridge-like shapes as the surrounding bedrock erodes away.
Mars
Videos
Mars is the fourth planet from the Sun. The surface of Mars is orange-red because it is covered in iron(III) oxide dust, giving it the nickname "the Red Planet". Mars is among the brightest objects in Earth's sky, and its high-contrast albedo features have made it a common subject for telescope viewing. It is classified as a terrestrial planet and is the second smallest of the Solar System's planets with a diameter of 6,779 km (4,212 mi). In terms of orbital motion, a Martian solar day (sol) is equal to 24.5 hours, and a Martian solar year is equal to 1.88 Earth years. Mars has two natural satellites that are small and irregular in shape: Phobos and Deimos.

Comparison: Earth and Mars

Curiosity's view of Martian soil and boulders after crossing the "Dingo Gap" sand dune
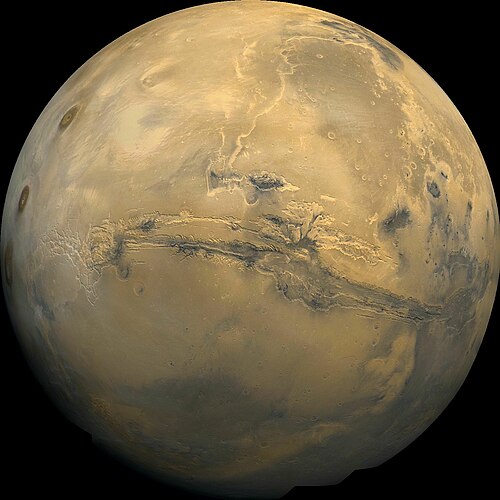
Valles Marineris, taken by the Viking 1 probe
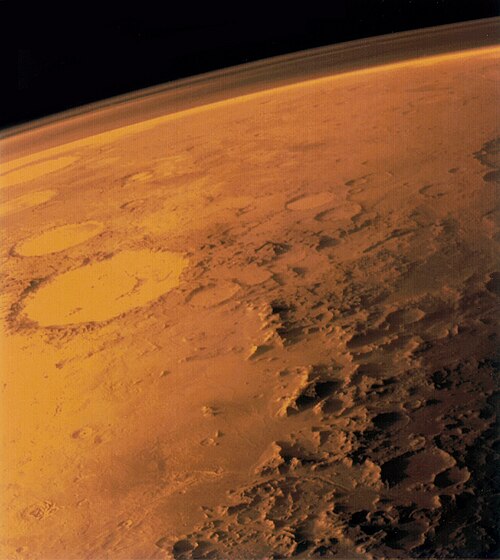
Edge-on view of Mars atmosphere by Viking 1 probe