RAM parity
Videos
RAM parity checking is the storing of a redundant parity bit representing the parity of a small amount of computer data stored in random-access memory, and the subsequent comparison of the stored and the computed parity to detect whether a data error has occurred.
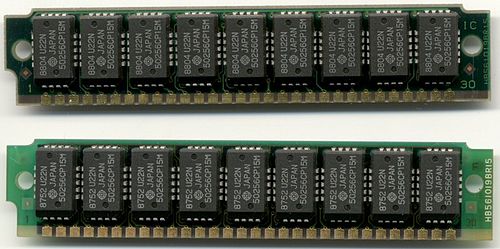
A 30-pin SIMM memory modules with 9 one-bit-wide memory chips. The ninth chip is used to store parity.
Random-access memory
Videos
Random-access memory is a form of electronic computer memory that can be read and changed in any order, typically used to store working data and machine code. A random-access memory device allows data items to be read or written in almost the same amount of time irrespective of the physical location of data inside the memory, in contrast with other direct-access data storage media, where the time required to read and write data items varies significantly depending on their physical locations on the recording medium, due to mechanical limitations such as media rotation speeds and arm movement.

A 64 bit memory chip die, the SP95 Phase 2 Buffer Memory produced at IBM mid 60s, versus memory core iron rings

Example of writable volatile random-access memory: Synchronous Dynamic RAM modules, primarily used as main memory in personal computers, workstations, and servers.

8GB DDR3 RAM stick with a white heatsink

These IBM tabulating machines from the mid-1930s used mechanical counters to store information.