Radar
Videos
Radar is a system that uses radio waves to determine the distance (ranging), direction, and radial velocity of objects relative to the site. It is a radiodetermination method used to detect and track aircraft, ships, spacecraft, guided missiles, motor vehicles, map weather formations, and terrain.
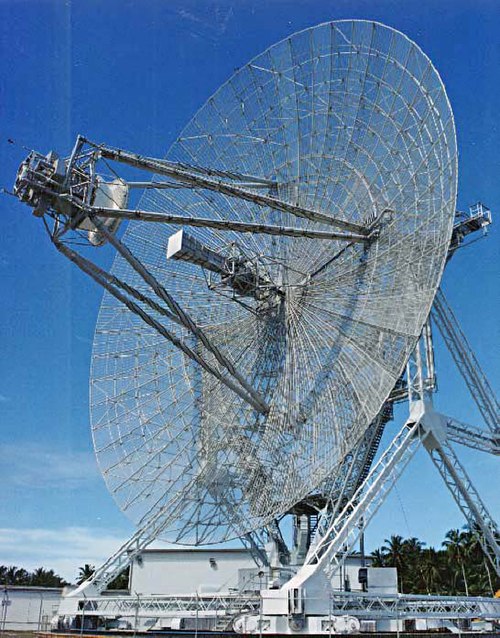

Radar of the type used for detection of aircraft. It rotates steadily, sweeping the airspace with a narrow beam.
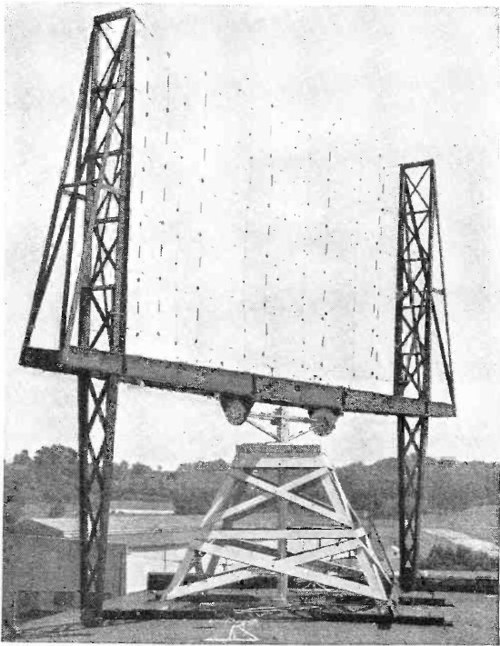
Experimental radar antenna, US Naval Research Laboratory, Anacostia, D. C., from the late 1930s (photo taken in 1945)

The first workable unit built by Robert Watson-Watt and his team
Aircraft
Videos
An aircraft is a vehicle that is able to fly by gaining support from the air. It counters the force of gravity by using either static lift or the dynamic lift of an airfoil, or, in a few cases, direct downward thrust from its engines. Common examples of aircraft include airplanes, helicopters, airships, gliders, paramotors, and hot air balloons.

The Cessna 172 Skyhawk is the most produced aircraft in history.

Hot air balloons

Airship USS Akron over Manhattan in the 1930s

An Airbus A380, the world's largest passenger airliner