Robot
Videos
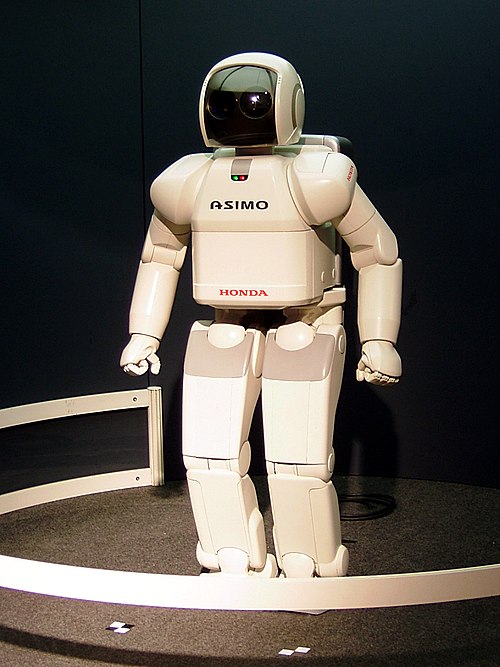
A robot is a machine—especially one programmable by a computer—capable of carrying out a complex series of actions automatically. A robot can be guided by an external control device, or the control may be embedded within. Robots may be constructed to evoke human form, but most robots are task-performing machines, designed with an emphasis on stark functionality, rather than expressive aesthetics.

Articulated welding robots used in a factory are a type of industrial robot.

KITT (a fictional robot) is mentally anthropomorphic; it thinks like a human.

iCub is physically anthropomorphic; it looks like a human.
Machine
Videos
A machine is a physical system that uses power to apply forces and control movement to perform an action. The term is commonly applied to artificial devices, such as those employing engines or motors, but also to natural biological macromolecules, such as molecular machines. Machines can be driven by animals and people, by natural forces such as wind and water, and by chemical, thermal, or electrical power, and include a system of mechanisms that shape the actuator input to achieve a specific application of output forces and movement. They can also include computers and sensors that monitor performance and plan movement, often called mechanical systems.

A Honda F1 racecar engine

A flint hand axe was found in Winchester.
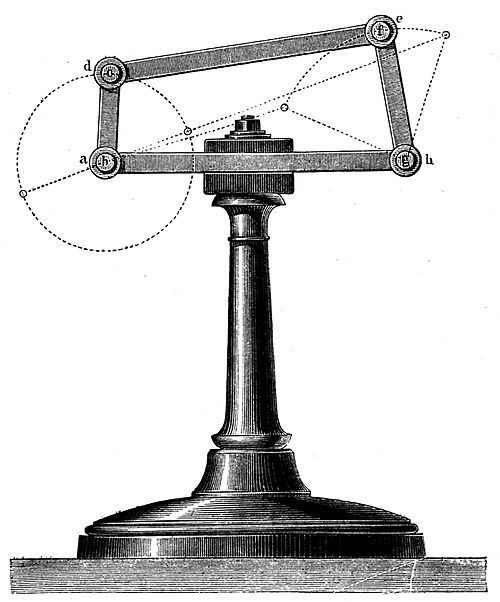
The Kinematics of Machinery (1876) has an illustration of a four-bar linkage.

Diesel engine, friction clutch and gear transmission of an automobile