A stepper motor, also known as step motor or stepping motor, is an electrical motor that rotates in a series of small angular steps, instead of continuously. Stepper motors are a type of digital actuator. Like other electromagnetic actuators, they convert electric energy into mechanical position can be commanded to move and hold at one of these steps without any position sensor for feedback, as long as the motor is correctly sized to the application in respect to torque and speed.
A stepper motor
The 28BYJ-48, accompanied by a ULN2003 driver, is one of the most popular stepper motors among hobbyists.
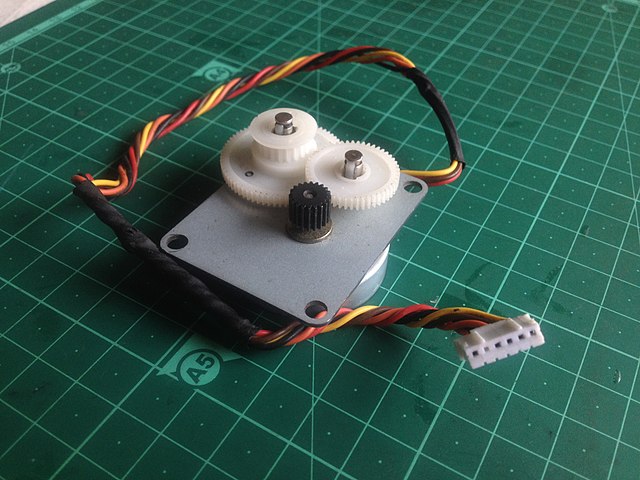
Stepper motors like this are often accompanied by a reduction gear mechanism to increase the output torque. The one shown here was used in a flatbed scanner.
A bipolar stepper motor used in DVD drives for moving the laser assembly.
An electric motor is an electrical machine that converts electrical energy into mechanical energy. Most electric motors operate through the interaction between the motor's magnetic field and electric current in a wire winding to generate force in the form of torque applied on the motor's shaft. An electric generator is mechanically identical to an electric motor, but operates in reverse, converting mechanical energy into electrical energy.
Faraday's electromagnetic experiment, 1821, the first demonstration of the conversion of electrical energy into motion
Jedlik's "electromagnetic self-rotor", 1827 (Museum of Applied Arts, Budapest). The historic motor still works perfectly today.
An electric motor presented to Kelvin by James Joule in 1842, Hunterian Museum, Glasgow
Rotor (left) and stator (right)