A Stewart platform is a type of parallel manipulator that has six prismatic actuators, commonly hydraulic jacks or electric linear actuators, attached in pairs to three positions on the platform's baseplate, crossing over to three mounting points on a top plate. All 12 connections are made via universal joints. Devices placed on the top plate can be moved in the six degrees of freedom in which it is possible for a freely-suspended body to move: three linear movements x, y, z, and the three rotations.
The AMiBA radio telescope, a cosmic microwave background experiment, is mounted on a 6 m carbon fibre hexapod.
Two hexapod positioners
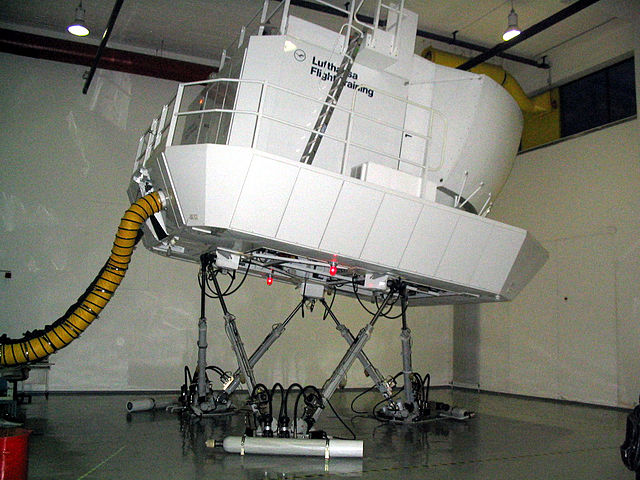
A Stewart platform in use by Lufthansa
Eric Gough's Tire Testing Machine, which is a Stewart platform with large jacks
A parallel manipulator is a mechanical system that uses several computer-controlled serial chains to support a single platform, or end-effector. Perhaps, the best known parallel manipulator is formed from six linear actuators that support a movable base for devices such as flight simulators. This device is called a Stewart platform or the Gough-Stewart platform in recognition of the engineers who first designed and used them.
Hexapod positioning systems, also known as Stewart Platforms.
A five-bar parallel robot
Sketchy, a portrait-drawing delta robot
Prototype of "PAR4", a 4-degree-of-freedom, high-speed, parallel robot.