Time-of-flight camera
Videos
Page
A time-of-flight camera, also known as time-of-flight sensor, is a range imaging camera system for measuring distances between the camera and the subject for each point of the image based on time-of-flight, the round trip time of an artificial light signal, as provided by a laser or an LED. Laser-based time-of-flight cameras are part of a broader class of scannerless LIDAR, in which the entire scene is captured with each laser pulse, as opposed to point-by-point with a laser beam such as in scanning LIDAR systems.
Time-of-flight camera products for civil applications began to emerge around 2000, as the semiconductor processes allowed the production of components fast enough for such devices. The systems cover ranges of a few centimeters up to several kilometers.

Diagrams illustrating the principle of a time-of-flight camera with analog timing

Range image of a human face captured with a time-of-flight camera (artist’s depiction)

The Samsung Galaxy S20 Ultra features three rear-facing camera lenses and a ToF camera.
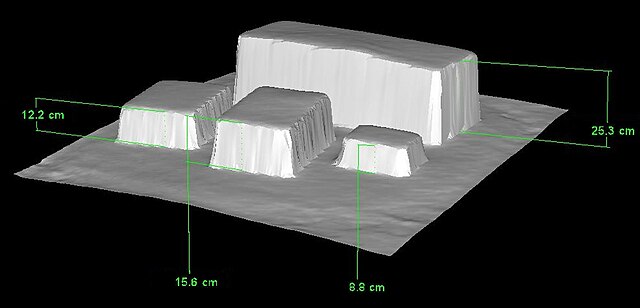
Range image with height measurements
Time of flight
Videos
Page
This information can then be used to measure velocity or path length, or as a way to learn about the particle or medium's properties. The traveling object may be detected directly or indirectly. Time of flight technology has found valuable applications in the monitoring and characterization of material and biomaterials, hydrogels included.
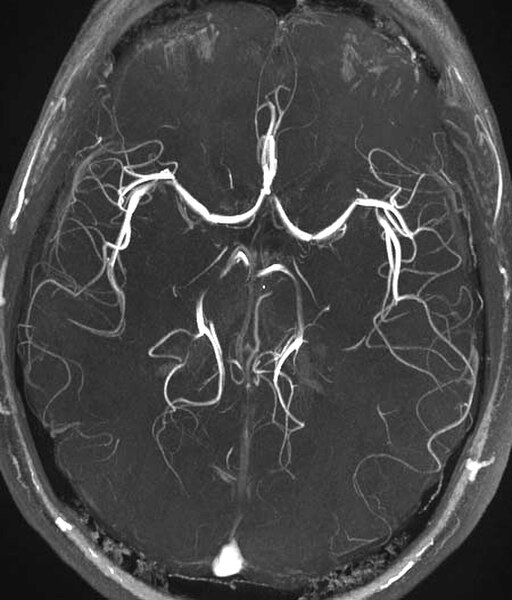
Magnetic resonance angiograph created by the ToF method

Shimadzu Ion Trap ToF