In knot theory, a branch of mathematics, the trefoil knot is the simplest example of a nontrivial knot. The trefoil can be obtained by joining the two loose ends of a common overhand knot, resulting in a knotted loop. As the simplest knot, the trefoil is fundamental to the study of mathematical knot theory.
Trefoil knot used in ATV's logo
Mathematical surface in which the boundary is the trefoil knot in different angles.
In topology, knot theory is the study of mathematical knots. While inspired by knots which appear in daily life, such as those in shoelaces and rope, a mathematical knot differs in that the ends are joined so it cannot be undone, the simplest knot being a ring. In mathematical language, a knot is an embedding of a circle in 3-dimensional Euclidean space, . Two mathematical knots are equivalent if one can be transformed into the other via a deformation of upon itself ; these transformations correspond to manipulations of a knotted string that do not involve cutting it or passing it through itself.
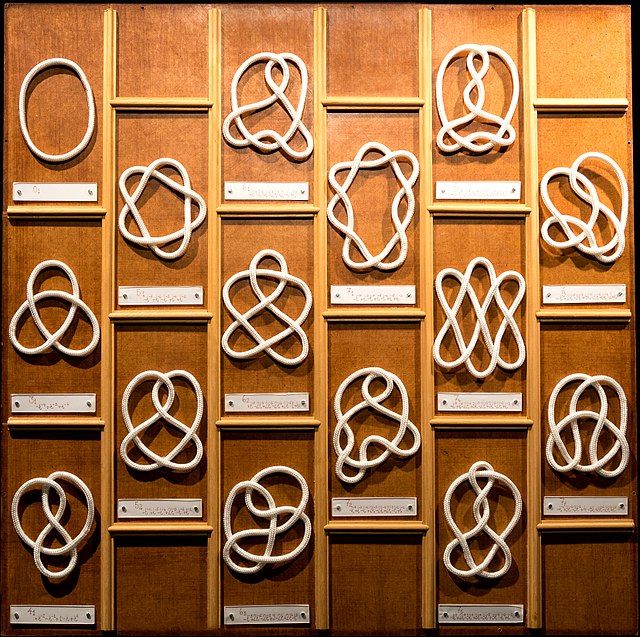
Examples of different knots including the trivial knot (top left) and the trefoil knot (below it)
Intricate Celtic knotwork in the 1200-year-old Book of Kells
The first knot tabulator, Peter Guthrie Tait
A 3D print depicting the complement of the figure eight knot by François Guéritaud, Saul Schleimer, and Henry Segerman