Velocity
Videos
Velocity is the speed in combination with the direction of motion of an object. Velocity is a fundamental concept in kinematics, the branch of classical mechanics that describes the motion of bodies.

As a change of direction occurs while the racing cars turn on the curved track, their velocity is not constant even if their speed is.
Kinematics
Videos
Kinematics is a subfield of physics and mathematics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of both applied and pure mathematics since it can be studied without considering the mass of a body or the forces acting upon it. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.

Each particle on the wheel travels in a planar circular trajectory (Kinematics of Machinery, 1876).
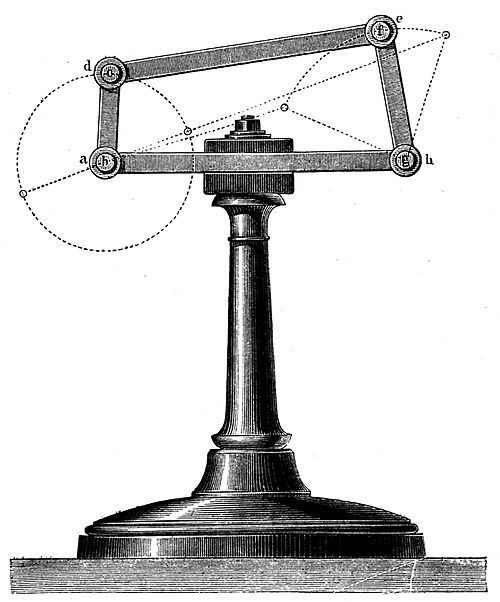
Illustration of a four-bar linkage from Kinematics of Machinery, 1876