Autonomous robot
Videos
Photos
An autonomous robot is a robot that acts without recourse to human control. Historic examples include space probes. Modern examples include self-driving vacuums and cars.

Robot GUI display showing battery voltage and other proprioceptive data in lower right-hand corner. The display is for user information only. Autonomous robots monitor and respond to proprioceptive sensors without human intervention to keep themselves safe and operating properly.

The Seekur and MDARS robots demonstrate their autonomous navigation and security capabilities at an airbase.

Sophia, a robot known for human-like appearance and interactions

A food delivery robot
Robot
Videos
Photos
A robot is a machine—especially one programmable by a computer—capable of carrying out a complex series of actions automatically. A robot can be guided by an external control device, or the control may be embedded within. Robots may be constructed to evoke human form, but most robots are task-performing machines, designed with an emphasis on stark functionality, rather than expressive aesthetics.
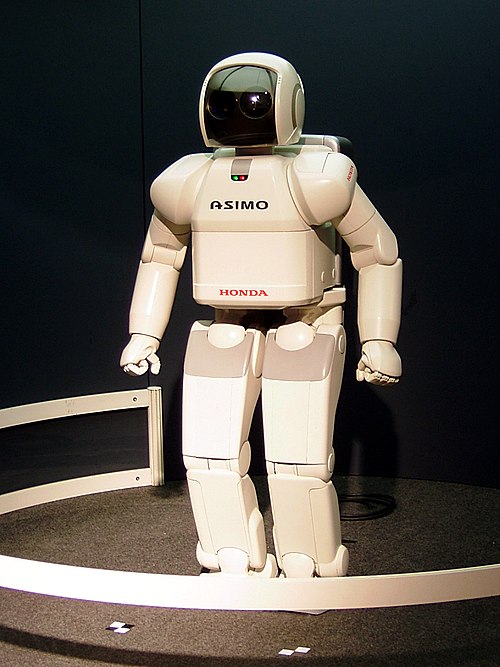
ASIMO (2000) at the Expo 2005

Articulated welding robots used in a factory are a type of industrial robot.

KITT (a fictional robot) is mentally anthropomorphic; it thinks like a human.

iCub is physically anthropomorphic; it looks like a human.