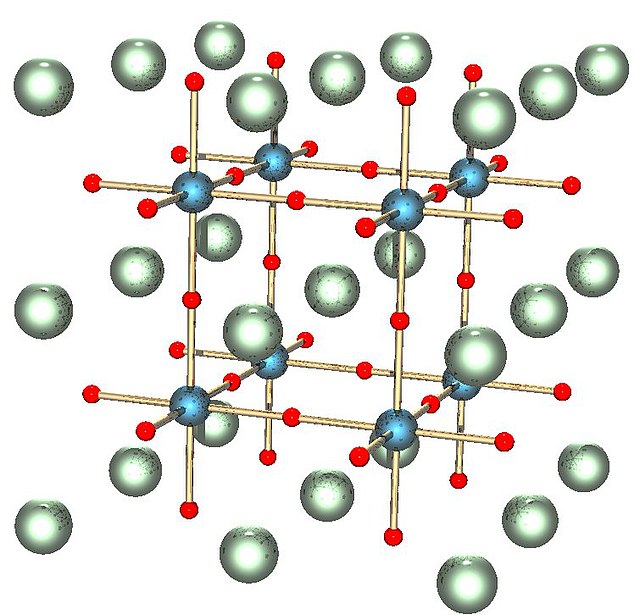
The cubic honeycomb or cubic cellulation is the only proper regular space-filling tessellation in Euclidean 3-space made up of cubic cells. It has 4 cubes around every edge, and 8 cubes around each vertex. Its vertex figure is a regular octahedron. It is a self-dual tessellation with Schläfli symbol {4,3,4}. John Horton Conway called this honeycomb a cubille.
Image: Perovskite
Image: Runcitruncated cubic honeycomb (Schoute 1911)
In geometry, a honeycomb is a space filling or close packing of polyhedral or higher-dimensional cells, so that there are no gaps. It is an example of the more general mathematical tiling or tessellation in any number of dimensions. Its dimension can be clarified as n-honeycomb for a honeycomb of n-dimensional space.
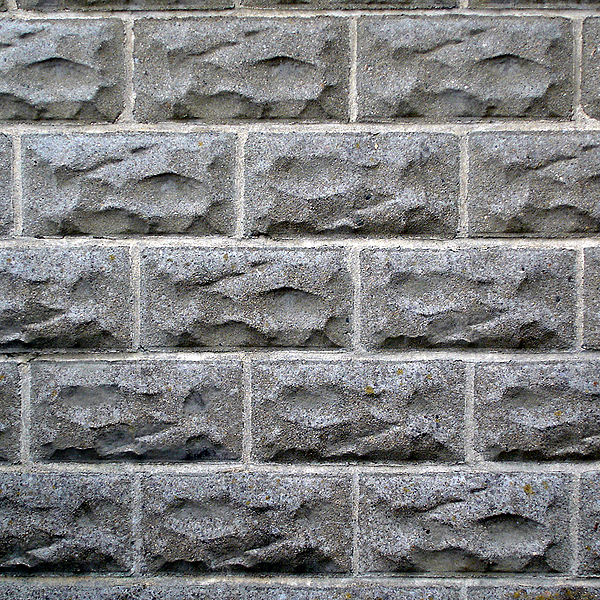
It is possible to fill the plane with polygons which do not meet at their corners, for example using rectangles, as in a brick wall pattern: this is not a proper tiling because corners lie part way along the edge of a neighbouring polygon. Similarly, in a proper honeycomb, there must be no edges or vertices lying part way along the face of a neighbouring cell. Interpreting each brick face as a hexagon having two interior angles of 180 degrees allows the pattern to be considered as a proper tiling. However, not all geometers accept such hexagons.