Floating-point arithmetic
In computing, floating-point arithmetic (FP) is arithmetic that represents subsets of real numbers using an integer with a fixed precision, called the significand, scaled by an integer exponent of a fixed base.
Numbers of this form are called floating-point numbers.
For example, 12.345 is a floating-point number in base ten with five digits of precision:
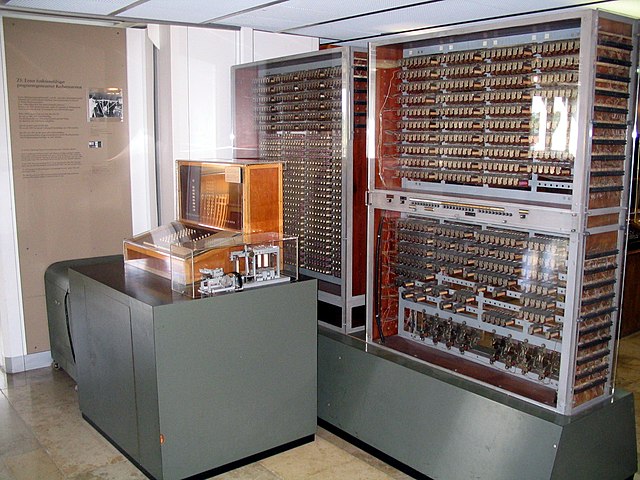
An early electromechanical programmable computer, the Z3, included floating-point arithmetic (replica on display at Deutsches Museum in Munich).
Leonardo Torres Quevedo, in 1914 published an analysis of floating point based on the analytical engine
Konrad Zuse, architect of the Z3 computer, which uses a 22-bit binary floating-point representation
William Kahan, principal architect of the IEEE 754 floating-point standard
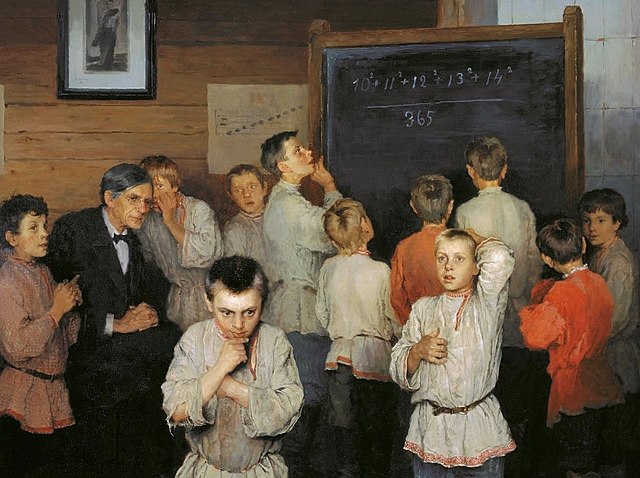
Arithmetic is an elementary branch of mathematics that studies numerical operations like addition, subtraction, multiplication, and division. In a wider sense, it also includes exponentiation, extraction of roots, and taking logarithms.
Calculations in mental arithmetic are done exclusively in the mind without relying on external aids.
Abacuses are tools to perform arithmetic operations by moving beads.
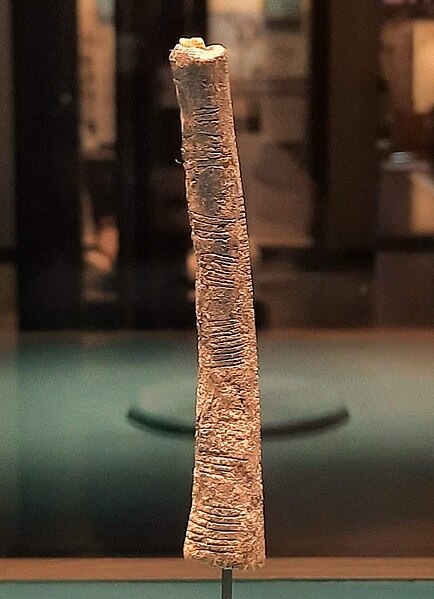
Some historians interpret the Ishango bone as one of the earliest arithmetic artifacts.
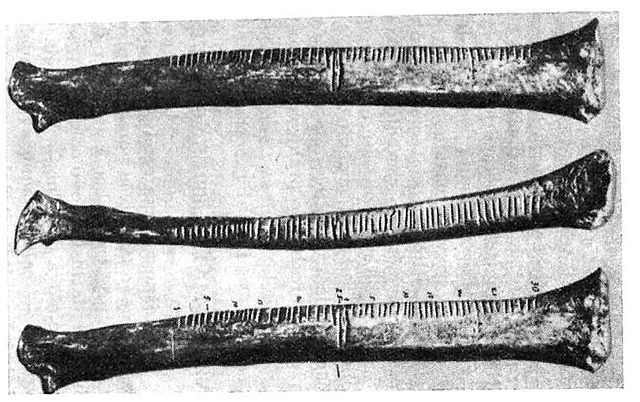
Image: Vlčí radius