Goth subculture
Videos
Photos
Goth is a music-based subculture that began in the United Kingdom during the early 1980s. It was developed by fans of gothic rock, an offshoot of the post-punk music genre. Post-punk artists who presaged the gothic rock genre and helped develop and shape the subculture include Siouxsie and the Banshees, Bauhaus, the Cure, and Joy Division.

A woman dressed in gothic style in the 1980s
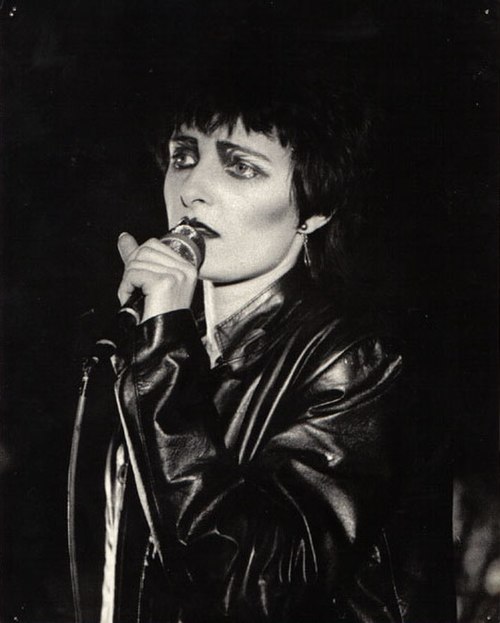
Siouxsie Sioux of Siouxsie and the Banshees in 1980

Bauhaus—Live in concert, 3 February 2006

Lead singer and guitarist Robert Smith of the Cure
Subculture
Videos
Photos
A subculture is a group of people within a cultural society that differentiates itself from the conservative and standard values to which it belongs, often maintaining some of its founding principles. Subcultures develop their own norms and values regarding cultural, political, and sexual matters. Subcultures are part of society while keeping their specific characteristics intact. Examples of subcultures include BDSM, hippies, hipsters, goths, steampunks, bikers, punks, skinheads, gopnik, hip-hoppers, metalheads, cosplayers, otaku, otherkin, furries, and more. The concept of subcultures was developed in sociology and cultural studies. Subcultures differ from countercultures.

A goth couple attending the Whitby Goth Weekend festival, dressed in typical Gothic Victorian and Elizabethan styles

Members of the seminal punk rock band Ramones wearing early punk fashion items such as Converse sneakers, black leather jackets, and blue jeans

Trekkies are a subculture of Star Trek fans.

Potato chip packages featuring hip hop subcultural designs in a case of mainstream commercial cultural merging