Humanoid robot
Videos
Photos
A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.

Ameca generation 1 pictured in the lab at Engineered Arts Ltd.

Model of Leonardo's robot with inner workings

iCub robot at the Genoa Science Festival, Italy, in 2009

Valkyrie, from NASA
Robot
Videos
Photos
A robot is a machine—especially one programmable by a computer—capable of carrying out a complex series of actions automatically. A robot can be guided by an external control device, or the control may be embedded within. Robots may be constructed to evoke human form, but most robots are task-performing machines, designed with an emphasis on stark functionality, rather than expressive aesthetics.
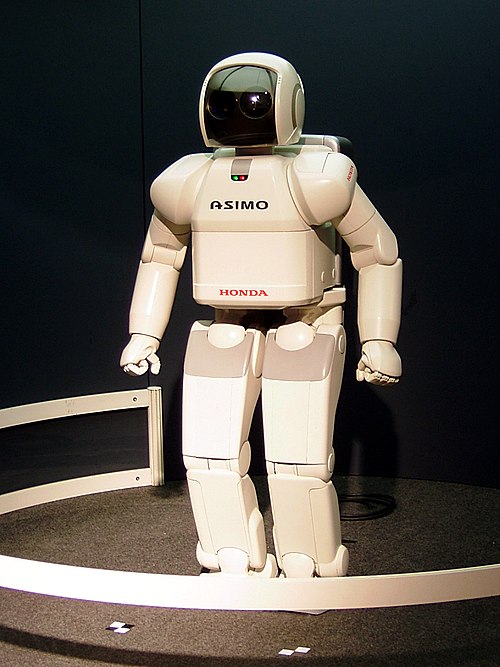
ASIMO (2000) at the Expo 2005

Articulated welding robots used in a factory are a type of industrial robot.

KITT (a fictional robot) is mentally anthropomorphic; it thinks like a human.
iCub is physically anthropomorphic; it looks like a human.