Liquid
Videos
A liquid is a nearly incompressible fluid that conforms to the shape of its container but retains a nearly constant volume independent of pressure. It is one of the four fundamental states of matter, and is the only state with a definite volume but no fixed shape.

The formation of a spherical droplet of liquid water minimizes the surface area, which is the natural result of surface tension in liquids.
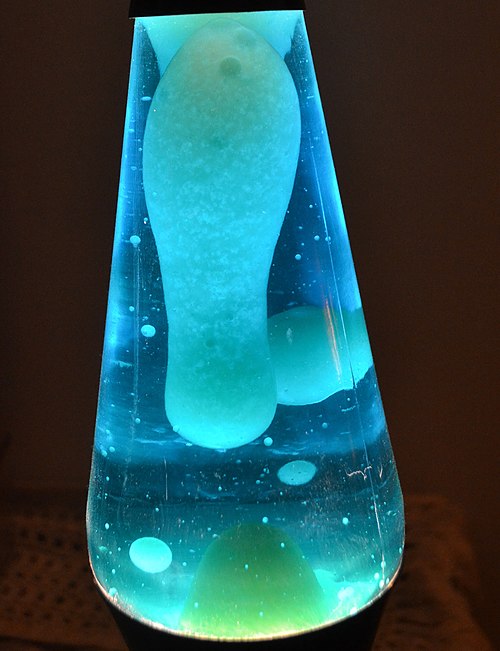
A lava lamp contains two immiscible liquids (a molten wax and a watery solution) which add movement due to convection. In addition to the top surface, surfaces also form between the liquids, requiring a tension breaker to recombine the wax droplets at the bottom.

Cavitation in water from a boat propeller

Surface waves in water
Boiling point
Videos
The boiling point of a substance is the temperature at which the vapor pressure of a liquid equals the pressure surrounding the liquid and the liquid changes into a vapor.
