MIL-STD-1553
Videos
Page
MIL-STD-1553 is a military standard published by the United States Department of Defense that defines the mechanical, electrical, and functional characteristics of a serial data bus. It was originally designed as an avionic data bus for use with military avionics, but has also become commonly used in spacecraft on-board data handling (OBDH) subsystems, both military and civil, including use on the James Webb space telescope. It features multiple redundant balanced line physical layers, a (differential) network interface, time-division multiplexing, half-duplex command/response protocol, and can handle up to 31 Remote Terminals (devices); 32 is typically designated for broadcast messages. A version of MIL-STD-1553 using optical cabling in place of electrical is known as MIL-STD-1773.
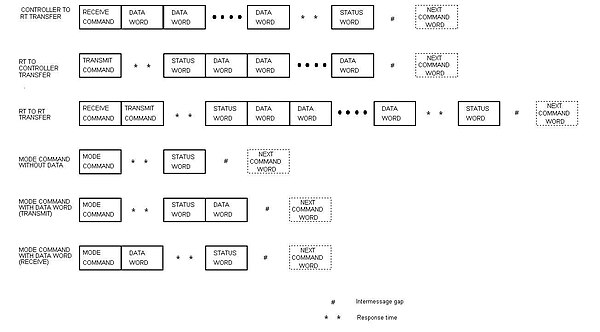
Figure 6: Information transfer formats. Note: "TRANSMIT COMMAND" equals "command word"

Figure 7: Broadcast information transfer formats

Figure 9: Data bus interface using transformer coupling

Figure 10: Data bus interface using direct coupling
Bus (computing)
Videos
Page
In computer architecture, a bus is a communication system that transfers data between components inside a computer, or between computers. This expression covers all related hardware components and software, including communication protocols.

Four PCI Express bus card slots (from top to second from bottom: ×4, ×16, ×1 and ×16), compared to a 32-bit conventional PCI bus card slot (very bottom)