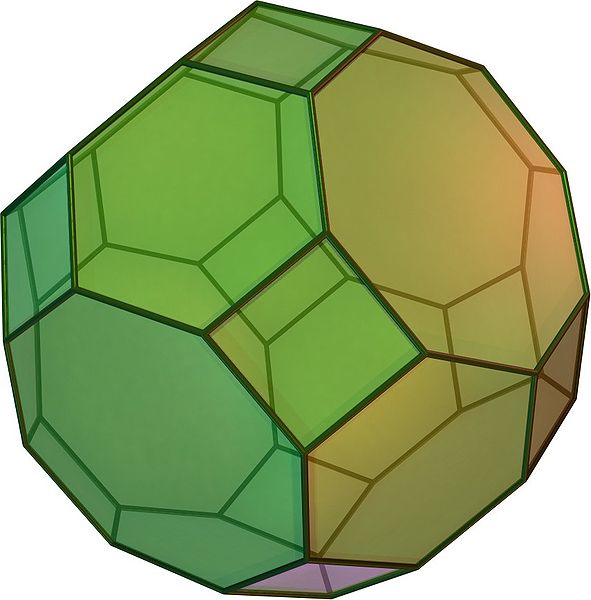
In geometry, the rhombicosidodecahedron is an Archimedean solid, one of thirteen convex isogonal nonprismatic solids constructed of two or more types of regular polygon faces.
A version with golden rectangles is used as vertex element of the construction set Zometool.
Image: Rhombicosidodecahedron
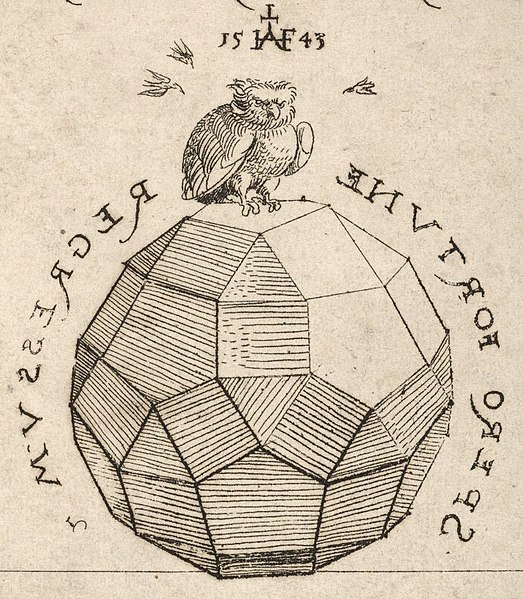
Image: Houghton Typ 520.43.454, crop solid and owl
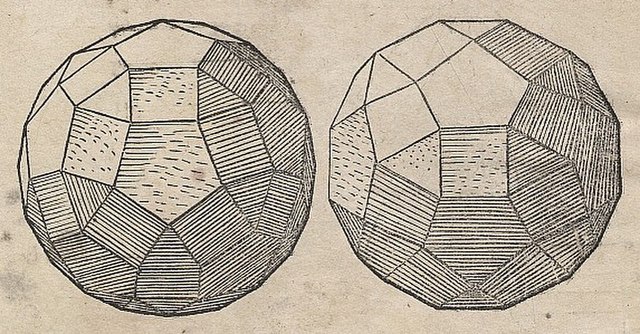
Image: Fotothek df tg 0003625, crop rhombicosidodecahedron
In geometry, an Archimedean solid is one of 13 convex polyhedra whose faces are regular polygons and whose vertices are all symmetric to each other. They were first enumerated by Archimedes. They belong to the class of convex uniform polyhedra, the convex polyhedra with regular faces and symmetric vertices, which is divided into the Archimedean solids, the five Platonic solids, and the two infinite families of prisms and antiprisms. The pseudorhombicuboctahedron is an extra polyhedron with regular faces and congruent vertices, but it is not generally counted as an Archimedean solid because it is not vertex-transitive. An even larger class than the convex uniform polyhedra is the Johnson solids, whose regular polygonal faces do not need to meet in identical vertices.
Image: Rhombicuboctahedron
Image: Truncatedcuboctahedron
Image: Truncatedicosahedron
Image: Rhombicosidodecahedron