Square antiprism
Videos
Photos
In geometry, the square antiprism is the second in an infinite family of antiprisms formed by an even-numbered sequence of triangle sides closed by two polygon caps. It is also known as an anticube.

One World Trade Center building
Uniform polyhedron
Videos
Photos
In geometry, a uniform polyhedron has regular polygons as faces and is vertex-transitive. It follows that all vertices are congruent.

Platonic solid: Tetrahedron

Image: Tetrakishexahedron
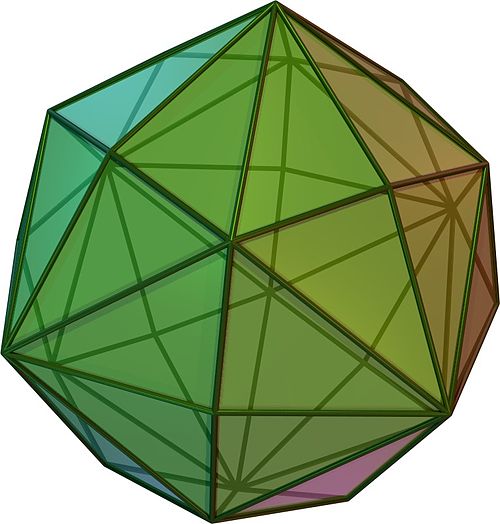
Image: Disdyakisdodecahedron

Image: Disdyakistriacontahedron