Stellar evolution is the process by which a star changes over the course of time. Depending on the mass of the star, its lifetime can range from a few million years for the most massive to trillions of years for the least massive, which is considerably longer than the current age of the universe. The table shows the lifetimes of stars as a function of their masses. All stars are formed from collapsing clouds of gas and dust, often called nebulae or molecular clouds. Over the course of millions of years, these protostars settle down into a state of equilibrium, becoming what is known as a main-sequence star.
The change in size with time of a Sun-like star
Artist's depiction of the life cycle of a Sun-like star, starting as a main-sequence star at lower left then expanding through the subgiant and giant phases, until its outer envelope is expelled to form a planetary nebula at upper right
Chart of stellar evolution
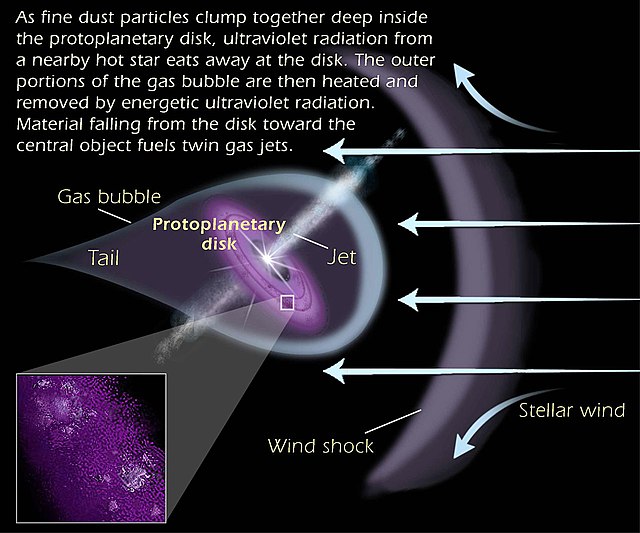
Illustration of the dynamics of a proplyd
A star is a luminous spheroid of plasma held together by self-gravity. The nearest star to Earth is the Sun. Many other stars are visible to the naked eye at night; their immense distances from Earth make them appear as fixed points of light. The most prominent stars have been categorised into constellations and asterisms, and many of the brightest stars have proper names. Astronomers have assembled star catalogues that identify the known stars and provide standardized stellar designations. The observable universe contains an estimated 1022 to 1024 stars. Only about 4,000 of these stars are visible to the naked eye—all within the Milky Way galaxy.
Image of the Sun, a G-type main-sequence star, the closest to Earth
A star-forming region in the Large Magellanic Cloud
Stars in the night sky
Infrared image from NASA's Spitzer Space Telescope showing hundreds of thousands of stars in the Milky Way galaxy