A superscalar processor is a CPU that implements a form of parallelism called instruction-level parallelism within a single processor. In contrast to a scalar processor, which can execute at most one single instruction per clock cycle, a superscalar processor can execute more than one instruction during a clock cycle by simultaneously dispatching multiple instructions to different execution units on the processor. It therefore allows more throughput than would otherwise be possible at a given clock rate. Each execution unit is not a separate processor, but an execution resource within a single CPU such as an arithmetic logic unit.
Processor board of a CRAY T3e supercomputer with four superscalar Alpha 21164 processors
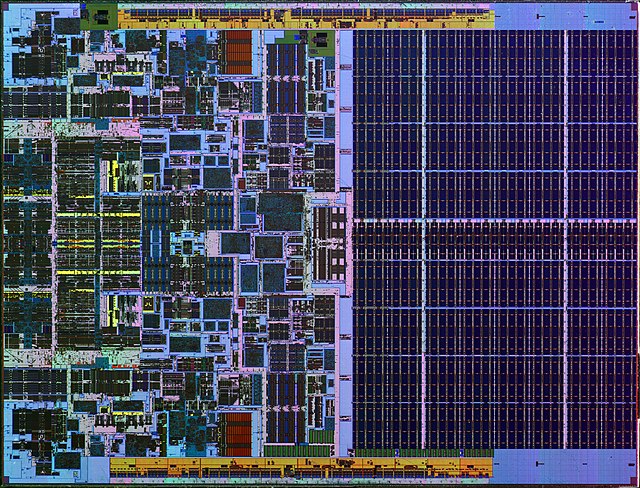
A central processing unit (CPU), also called a central processor, main processor, or just processor, is the most important processor in a given computer. Its electronic circuitry executes instructions of a computer program, such as arithmetic, logic, controlling, and input/output (I/O) operations. This role contrasts with that of external components, such as main memory and I/O circuitry, and specialized coprocessors such as graphics processing units (GPUs).
Inside a central processing unit: The integrated circuit of Intel's Xeon 3060, first manufactured in 2006
EDVAC, one of the first stored-program computers
IBM PowerPC 604e processor
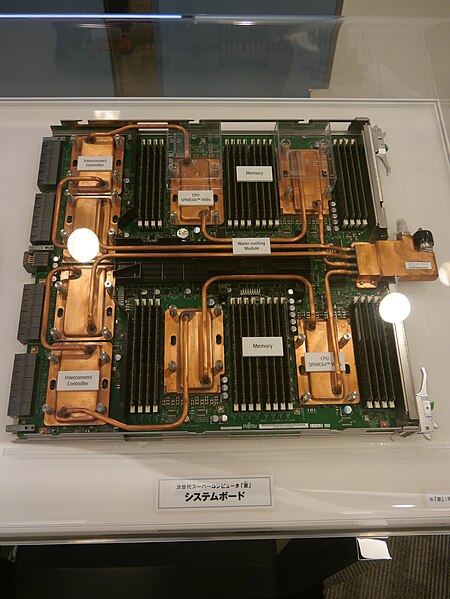
Fujitsu board with SPARC64 VIIIfx processors