Victor David Scheinman was an American pioneer in the field of robotics.
He was born in Augusta, Georgia, where his father Léonard was stationed with the US Army. At the end of the war, the family moved to Brooklyn and his father returned to work as a professor of psychiatry. His mother taught at a Hebrew school.
Victor Scheinman at the MIT Museum with a PUMA robot in 2014
The Stanford arm, designed in 1969 by Scheinman and later built by him, was the first electric robot arm designed for computer control.
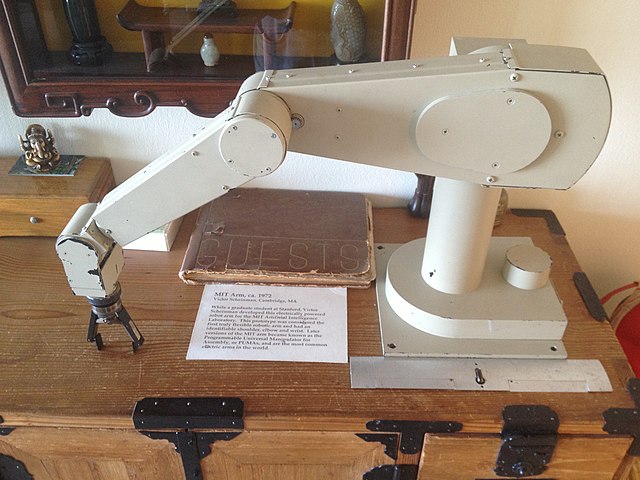
Scheinman's MIT Arm, built for MIT's Artificial Intelligence Lab ca. 1972, forerunner of the PUMA
Scheinman setting up his RobotWorld system in the Automatix booth at the Robots '86 show in Detroit in June 1986. The underside of the top is a two-dimensional linear motor grid. Small manipulators and camera sensor modules can move freely on the grid to perform assembly operations and other manipulations in the space underneath.
A robot is a machine—especially one programmable by a computer—capable of carrying out a complex series of actions automatically. A robot can be guided by an external control device, or the control may be embedded within. Robots may be constructed to evoke human form, but most robots are task-performing machines, designed with an emphasis on stark functionality, rather than expressive aesthetics.
ASIMO (2000) at the Expo 2005
Articulated welding robots used in a factory are a type of industrial robot.
KITT (a fictional robot) is mentally anthropomorphic; it thinks like a human.
iCub is physically anthropomorphic; it looks like a human.